Simon Godsill 
Background - Research - Publications - Teaching
Position: Professor of Statistical Signal Processing
Office Location: Div F Office, Floor O Baker Building
Telephone: +44 1223 332604
E-mail: sjg30 [at] cam.ac.uk
Dept. of Engineering, 
University of Cambridge,
Trumpington Street,
Cambridge.
CB2 1PZ, UK
Background
Simon Godsill is Head of Information Engineering (Div F), and Professor of Statistical Signal Processing in the Engineering Department at Cambridge University. He is also a Professorial Fellow at Corpus Christi College Cambridge. He coordinates an active research group in Signal Inference and its Applications, specializing in Bayesian computational methodology, multiple object tracking, spatio-temporal inference, audio and music processing, and stochastic process simulation/inference. A particular methodological theme over recent years has been the development of novel techniques for optimal Bayesian filtering and smoothing, using computastional methods such as Sequential Monte Carlo (SMC), Particle Filtering methods, Markov Chain Monte Carlo (MCMC), Variational Bayes and Expectation-Maximisation (EM).Publications:
See Google Scholar, where many of our papers can be found for download.
Selected Recent preprints:
Generalised shot noise representations of stochastic systems driven by non-Gaussian Lévy processes (Advances in Applied Probability, April 2024) Marcos Tapia Costa, Ioannis Kontoyiannis, Simon Godsill, https://doi.org/10.1017/apr.2023.63 ) https://arxiv.org/abs/2305.05931
Abstract: We consider the problem of obtaining effective representations for the solutions of linear, vector-valued stochastic differential equations (SDEs) driven by non-Gaussian pure-jump Lévy processes, and we show how such representations lead to efficient simulation methods. The processes considered constitute a broad class of models that find application across the physical and biological sciences, mathematics, finance and engineering. Motivated by important relevant problems in statistical inference, we derive new, generalised shot-noise simulation methods whenever a normal variance-mean (NVM) mixture representation exists for the driving Lévy process, including the generalised hyperbolic, normal-Gamma, and normal tempered stable cases. Simple, explicit conditions are identified for the convergence of the residual of a truncated shot-noise representation to a Brownian motion in the case of the pure Lévy process, and to a Brownian-driven SDE in the case of the Lévy-driven SDE. These results provide Gaussian approximations to the small jumps of the process under the NVM representation. The resulting representations are of particular importance in state inference and parameter estimation for Lévy-driven SDE models, since the resulting conditionally Gaussian structures can be readily incorporated into latent variable inference methods such as Markov chain Monte Carlo (MCMC), Expectation-Maximisation (EM), and sequential Monte Carlo.Point process simulation of generalised hyperbolic Lévy processes, Yaman Kindap, Simon Godsill Statistics and Computing 34 (1), 33, https://arxiv.org/abs/2303.10292
Generalised Hyperbolic State-space Models for Inference in Dynamic Systems, Yaman Kındap, Simon Godsill, IEEE Open J. Sig. Proc (2024), https://arxiv.org/abs/2309.11422
Non-Gaussian Process Regression Yaman Kındap, Simon Godsill https://arxiv.org/abs/2209.03117
Point process simulation of generalised inverse Gaussian processes and estimation of the Jaeger integral (J. Statistics and Computing 2021) Simon Godsill, Yaman Kındap https://arxiv.org/abs/2105.09429
Abstract: In this paper novel simulation methods are provided for the generalised inverse Gaussian (GIG) Lévy process. Such processes are intractable for simulation except in certain special edge cases, since the Lévy density associated with the GIG process is expressed as an integral involving certain Bessel Functions, known as the Jaeger integral in diffusive transport applications. We here show for the first time how to solve the problem indirectly, using generalised shot-noise methods to simulate the underlying point processes and constructing an auxiliary variables approach that avoids any direct calculation of the integrals involved. The resulting augmented bivariate process is still intractable and so we propose a novel thinning method based on upper bounds on the intractable integrand. Moreover our approach leads to lower and upper bounds on the Jaeger integral itself, which may be compared with other approximation methods. The shot noise method involves a truncated infinite series of decreasing random variables, and as such is approximate, although the series are found to be rapidly convergent in most cases. We note that the GIG process is the required Brownian motion subordinator for the generalised hyperbolic (GH) Lévy process and so our simulation approach will straightforwardly extend also to the simulation of these intractable proceses. Our new methods will find application in forward simulation of processes of GIG and GH type, in financial and engineering data, for example, as well as inference for states and parameters of stochastic processes driven by GIG and GH Lévy processes.Lévy State-Space Models for Tracking and Intent Prediction of Highly Maneuverable Objects R. Gan, B. Ahmad and S.J. Godsill. IEEE Transactions on Aerospace and Electronic Systems: 57.4 (2021), pp. 2021–2038. doi: 10.1109/TAES.2021.3088430.
The Lévy State Space Model Simon Godsill, Marina Riabiz, Ioannis Kontoyiannis https://arxiv.org/abs/1912.12524
Abstract: In this paper we introduce a new class of state space models based on shot-noise simulation representations of non-Gaussian Lévy-driven linear systems, represented as stochastic differential equations. In particular a conditionally Gaussian version of the models is proposed that is able to capture heavy-tailed non-Gaussianity while retaining tractability for inference procedures. We focus on a canonical class of such processes, the α-stable Lévy processes, which retain important properties such as self-similarity and heavy-tails, while emphasizing that broader classes of non-Gaussian Lévy processes may be handled by similar methodology. An important feature is that we are able to marginalise both the skewness and the scale parameters of these challenging models from posterior probability distributions. The models are posed in continuous time and so are able to deal with irregular data arrival times. Example modelling and inference procedures are provided using Rao-Blackwellised sequential Monte Carlo applied to a two-dimensional Langevin model, and this is tested on real exchange rate data.Nonasymptotic Gaussian approximation for inference with stable noise (IEEE Tr. Info. Th. 2020) Marina Riabiz, Tohid Ardeshiri, Ioannis Kontoyiannis, Simon Godsill
Selected Older Publications:
Journals: F. Septier A. Gning S. K. Pang S. Godsill L. Mihaylova, A. Carmi. Overview of sequential Bayesian Monte Carlo methods for group and extended object tracking. Digital Signal Processing, 25, February 2014. Pete Bunch and Simon Godsill. Approximations of the optimal importance density using Gaussian particle flow importance sampling. Journal of the American Statistical Association, 2015. Tatjana Lemke, Marina Riabiz, and Simon J Godsill. Fully Bayesian inference for α-stable distributions using a Poisson series representation. Digital Signal Processing , 47:96–115, 2015. Bashar I Ahmad, James K Murphy, Patrick M Langdon, Simon J Godsill, Robert Hardy, and Lee Skrypchuk. Intent inference for hand pointing gesture- based interactions in vehicles. IEEE transactions on cybernetics, 46(4):878– 889, 2016. F. Ahmad, J. Murphy, D. Vatansever, E. Stamatakis, and S. Godsill. Bayesian inference of task-based functional brain connectivity using Markov chain Monte Carlo methods. Journal of Selected Topics in Signal Processing, 2016. (Accepted). P. Bunch, J. Murphy, and S. Godsill. Bayesian learning of degenerate linear Gaussian state space models using Markov chain Monte Carlo. IEEE Trans- actions on Signal Processing, 64(16), 2016. Fredrik Lindsten, Pete Bunch, Simo S¨arkk¨a, Thomas B Sch¨on, and Simon J Godsill. Rao-blackwellized particle smoothers for conditionally linear gaussian models. IEEE Journal of Selected Topics in Signal Processing, 10(2):353–365, 2016. James Murphy and Simon J Godsill. Blocked particle Gibbs schemes for high dimensional interacting systems. IEEE Journal of Selected Topics in Signal Processing, 10(2):328–342, 2016. Geliang Zhang, Hugh Christensen, Guolong Li, and Simon Godsill. A correction note for price dynamics in a Markovian limit order market. SIAM Journal on Financial Mathematics, 7(1):152–158, 2016. Conferences: Bashar I Ahmad, Patrick M Langdon, Pete Bunch, and Simon J Godsill. Prob- abilistic intentionality prediction for target selection based on partial cursor tracks. In International Conference on Universal Access in Human-Computer Interaction, pages 427–438. Springer International Publishing, 2014. Bashar I Ahmad, Patrick M Langdon, Simon J Godsill, Robert Hardy, Eduardo Dias, and Lee Skrypchuk. Interactive displays in vehicles: Improving usability with a pointing gesture tracker and bayesian intent predictors. In Proceed- ings of the 6th International Conference on Automotive User Interfaces and Interactive Vehicular Applications, pages 1–8. ACM, 2014. Bashar I Ahmad, James Murphy, Patrick M Langdon, and Simon J Godsill. Bayesian target prediction from partial finger tracks: Aiding interactive dis- plays in vehicles. In Information Fusion (FUSION), 2014 17th International Conference on, pages 1–7. IEEE, 2014. Bashar I Ahmad, James Murphy, Patrick M Langdon, and Simon J Godsill. Filtering perturbed in-vehicle pointing gesture trajectories: Improving the reliability of intent inference. In 2014 IEEE International Workshop on Ma- chine Learning for Signal Processing (MLSP), pages 1–6. IEEE, 2014. B.I. Ahmad, J. Murphy, P.M. Langdon, and S.J. Godsill. Bayesian target pre- diction from partial finger tracks: Aiding interactive displays in vehicles. InInformation Fusion (FUSION), 2014 17th International Conference on, pages 1–7, July 2014. B.I. Ahmad, J. Murphy, P.M. Langdon, and S.J. Godsill. Filtering perturbed in-vehicle pointing gesture trajectories: Improving the reliability of intent inference. InMachine Learning for Signal Processing (MLSP), 2014 IEEE International Workshop on, pages 1–6, Sept 2014. T. Lemke and S.J. Godsill. A poisson series approach to Bayesian Monte Carlo in- ference for skewed alpha-stable distributions. In Acoustics, Speech and Signal Processing (ICASSP), 2014 IEEE International Conference on, pages 8023– 8027, May 2014. M.R. Mestre, S.J. Godsill, and W.J. Fitzgerald. Bayesian detection of single- trial event-related potentials. In Acoustics, Speech and Signal Processing (ICASSP), 2014 IEEE International Conference on, pages 4693–4697, May 2014. James Murphy and Simon Godsill. Road-assisted multiple target tracking in clutter. In Information Fusion (FUSION), 2014 17th International Confer- ence on , pages 1–8. IEEE, 2014. Bashar I Ahmad, James Murphy, Patrick M Langdon, Robert Hardy, and Si- mon J Godsill. Destination inference using bridging distributions. In 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP) , pages 5585–5589. IEEE, 2015. Simon Godsill, Herbert Buchner, and Jan Skoglund. Detection and suppression of keyboard transient noise in audio streams with auxiliary keybed micro- phone. In 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pages 379–383. IEEE, 2015. James Murphy and Simon Godsill. Bayesian parameter estimation of jump- Langevin systems for trend following in finance. In 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pages 4125–4129. IEEE, 2015. James Murphy and Simon Godsill. Efficient filtering and sampling for a class of time-varying linear systems. In 2015 IEEE International Conference on Acoustics, Speech and Signal Processing (ICASSP), pages 3701–3705. IEEE, 2015.Research Areas - Signal Inference and its Applications.
- Bayesian Computational Methods (including Particle Filters/Smoothers and MCMC
- Audio and Music Processing
- Tracking and Spatio-temporal Inference
Bayesian Computational Methods for Signal Processing
Underpinning much of our work is the Bayesian paradigm and associated algorithms for inference about the parameters and structure of complex systems. In the Bayesian approach data is combined with any prior information available in an optimal fashion using probability distributions. We are particularly concerned with the development of new methods appropriate to the applications above. These applications are often sequential in nature (the data arrive one-by-one and a decision/estimate is required with small or no delay), hence we focus considerable attention on sequential learning methods such as Sequential Monte Carlo (particle filtering). Other problems are batch in nature (the data arrive all at once, or we can wait until all of the data have arrived before processing) - in those cases batch algorithms can be used, and we focus attention on stochastic simulation methods such as Markov chain Monte Carlo (MCMC), including those for model uncertainty problems (reversible jump MCMC, etc.). Novel techniques are developed to help tailor these methods to the applications at hand. Selected papers: Recent: F. Septier A. Gning S. K. Pang S. Godsill L. Mihaylova, A. Carmi. Overview of sequential Bayesian Monte Carlo methods for group and extended object tracking. Digital Signal Processing, 25, February 2014. Pete Bunch and Simon Godsill. Approximations of the optimal importance density using gaussian particle flow importance sampling. Journal of the American Statistical Association, 0(ja):0–0, 2015. Xi Chen, Simo Sarkka, and Simon Godsill. A Bayesian particle filtering method for brain source localisation. Digital Signal Processing, 47:192 – 204, 2015. Special Issue in Honour of William J. (Bill) Fitzgerald. Tatjana Lemke, Marina Riabiz, and Simon J Godsill. Fully Bayesian inference for α-stable distributions using a Poisson series representation. Digital Signal Processing, 47:96–115, 2015. P. Bunch, J. Murphy, and S. Godsill. Bayesian learning of degenerate linear Gaussian state space models using Markov chain Monte Carlo. IEEE Trans- actions on Signal Processing , 64(16), 2016. Fredrik Lindsten, Pete Bunch, Simo S¨arkk¨a, Thomas B Sch¨on, and Simon J Godsill. Rao-blackwellized particle smoothers for conditionally linear gaussian models. IEEE Journal of Selected Topics in Signal Processing, 10(2):353–365, 2016. James Murphy and Simon J Godsill. Blocked particle gibbs schemes for high dimensional interacting systems. IEEE Journal of Selected Topics in Signal Processing, 10(2):328–342, 2016. Pre-2012 archive: Markov Chain Monte Carlo (MCMC) methods, including model uncertainty:- Lemke, T and Godsill, SJ (2012) Linear Gaussian computations for near-exact Bayesian Monte Carlo inference in skewed alpha-stable time series models. ICASSP, IEEE International Conference on Acoustics, Speech and Signal Processing - Proceedings. pp. 3737-3740. ISSN 1520-6149
- Lemke, T and Godsill, SJ (2011) Enhanced poisson sum representation for alpha-stable processes. ICASSP, IEEE International Conference on Acoustics, Speech and Signal Processing - Proceedings. pp. 4100-4103. ISSN 1520-614
- P. J. Wolfe, S. J. Godsill, and W.J. Ng. Bayesian variable selection and regularisation for time-frequency surface estimation . Journal of the Royal Statistical Society, Series B, 2004.
- J. Vermaak, C. Andrieu, A. Doucet, and S. J. Godsill. Bayesian model selection of autoregressive processes. J. Time Series Anal. (In Press).
- S. J. Godsill. Discussion of `trans-dimensional Markov chain Monte Carlo' by Peter J. Green. In Highly Structured Stochastic Systems. OUP, 2003.
- Doucet, S. J. Godsill, and C. P. Robert. Marginal maximum a posteriori estimation using MCMC. Statistics and Computing, 12:77-84, 2002.
- S. J. Godsill. On the relationship between Markov chain Monte Carlo methods for model uncertainty. J. Comp. Graph. Stats., 10(2):230-248, 2001.
- Paul T. Troughton and Simon J. Godsill. MCMC methods for restoration of nonlinearly distorted autoregressive signals. Signal Processing, 81(1):83-97, 2001.
- S. J. Godsill. Inference in symmetric alpha-stable noise using MCMC and the slice sampler. In Proc. IEEE International Conference on Acoustics, Speech and Signal Processing, volume VI, pages 3806-3809, 2000.
- S. J. Godsill. MCMC and EM-based methods for inference in heavy-tailed processes with alpha-stable innovations. In Proc. IEEE Signal processing workshop on higher-order statistics, June 1999. Caesarea, Israel.
- S. J. Godsill and E. E. Kuruoglu. Bayesian inference for time series with heavy-tailed symmetric alpha -stable noise processes. CUED Tech rep INFENG...In Proc. Applications of heavy tailed distributions in economics, engineering and statistics, June 1999. Washington DC, USA.
Sequential Monte Carlo (particle filtering and smoothing) methods (pre-2013):
- Bunch, P and Godsill, SJ (2013) Particle Smoothing Algorithms for Variable Rate Models. IEEE Transactions on Signal Processing, 61. pp. 1663-1675.
- Christensen, HL and Murphy, J and Godsill, SJ (2012) Forecasting high-frequency futures returns using online langevin dynamics. IEEE Journal on Selected Topics in Signal Processing, 6. pp. 366-380. ISSN 1932-4553
- Carmi, A and Septier, F and Godsill, SJ (2012) The Gaussian mixture MCMC particle algorithm for dynamic cluster tracking. Automatica, 48. pp. 2454-2467. ISSN 0005-1098
- Särkkä, S and Bunch, P and Godsill, SJ (2012) A backward-simulation based Rao-Blackwellized particle smoother for conditionally linear Gaussian models. IFAC Proceedings Volumes (IFAC-PapersOnline), 16. pp. 506-511. ISSN 1474-6670
- Pang, SK and Li, J and Godsill, SJ (2011) Detection and Tracking of Coordinated Groups. IEEE T AERO ELEC SYS, 47. pp. 472-502. ISSN 0018-9251
- de Villiers, JP and Godsill, SJ and Singh, SS (2011) Particle predictive control. Journal of Statistical Planning and Inference, 141. pp. 1753-1763. ISSN 0378-3758
- Whiteley, NP and Singh, SS and Godsill, SJ (2010) Auxiliary particle implementation of the probability hypothesis density filter. IEEE Transactions on Aerospace and Electronic Systems, 46. pp. 1437-1454. ISSN 0018-9251
- Whiteley, NP and Johansen, AM and Godsill, SJ (2010) Monte Carlo filtering of piecewise deterministic processes. Journal of Computational and Graphical Statistics. pp. 1-21. ISSN 1061-8600
- O. Cappé, S.J. Godsill, and E.Moulines. An overview of existing methods and recent advances in sequential monte carlo. Proc. IEEE, May 2007.
- S.J. Godsill, J. Vermaak, K-F. Ng, and J-F. Li. Models and algorithms for tracking of manoeuvring objects using variable rate particle filters. Proc. IEEE, May 2007.
- Lombardi, MJ and Godsill, SJ (2006) On-line Bayesian estimation of signals in symmetric /spl alpha/-stable noise. IEEE Transactions on Signal Processing, 54. pp. 775-779. ISSN 1053-587X
- S. J. Godsill and J. Vermaak, Models and algorithms for tracking using trans-dimensional sequential Monte Carlo. In Proc. IEEE ICASSP 2004.#
- S.J. Godsill and A. Doucet and M. West. Monte Carlo smoothing for non-linear time series. Journal of the American Statistical Association. Vol.50, pp. 438-449, 2004
- J. Vermaak, S. J. Godsill, and A. Doucet. Radial basis function regression using trans-dimensional sequential Monte Carlo. In IEEE Workshop on Statistical Signal Processing, 2003.
- J. Vermaak, S. J. Godsill, and A. Doucet. Sequential Bayesian kernel regression. In Advances in Neural Information Processing Systems 16, Cambridge, MA. MIT Press, 2003.
- W. Fong, S. J. Godsill, A. Doucet, and M. West. Monte Carlo smoothing with application to speech enhancement. IEEE Trans. on Signal Processing, 50(2):438-449, February 2002.
- J. Vermaak, C. Andrieu, A. Doucet, and S. J. Godsill. Particle methods for Bayesian modelling and enhancement of speech signals . IEEE Trans. on Speech and Audio Processing, 10(3):173-185, 2002.
- S. J. Godsill and T. C. Clapp. Improvement strategies for Monte Carlo particle filters. In A Doucet, J. F. G. De Freitas, and N. J. Gordon, editors, Sequential Monte Carlo Methods in Practice. New York: Springer-Verlag, 2001.
- S. J. Godsill, A Doucet, and M West. Maximum a posteriori sequence estimation using Monte Carlo particle filters. Ann. Inst. Stat. Math., 53(1):82-96, March 2001.
- Doucet, S. J. Godsill, and C. Andrieu. On sequential Monte Carlo sampling methods for Bayesian filtering. Statistics and Computing, 10:197-208, 2000.
- T. C. Clapp and S. J. Godsill. Fixed-lag smoothing using sequential importance sampling. In J.M. Bernardo, J.O. Berger, A.P. Dawid, and A.F.M. Smith, editors, Bayesian Statistics VI, pages 743-752. Oxford University Press
Archival Tutorial Materials:
- Bayesian Computer intensive methods for Statistical Signal Processing (Plenary Address, IEEE Workshop on Statistical Signal Processing, St Louis August 2003)
- On-Line Bayesian Methods for estimation of non-linear non-Gaussian signals (Tutorial for Opening Workshop of SAMSI programme, North Carolina, Sept. 2002)
 The Signal Processing Laboratory has had long involvement in audio and music processing. Early work in sound restoration here in the 1980's led to the founding of the successful company CEDAR Audio Ltd. which produces DSP equipment for remastering and enhancement of sound in the recording, broadcast and forensic industries. In current research we are concerned with accurate modelling of digital audio and automated inference about the parameters and structure of those models. Research interests include computer music transcription, audio source separation, musical beat-tracking, chord recognition, Digital Audio Restoration, noise reduction, multichannel audio and sparse modelling with overcomplete dictionaries of atoms. Underpinning much of the work is a Bayesian statistical modelling approach to audio problems, see below.
See material for ICASSP 2015 paper on keystroke removal
The Signal Processing Laboratory has had long involvement in audio and music processing. Early work in sound restoration here in the 1980's led to the founding of the successful company CEDAR Audio Ltd. which produces DSP equipment for remastering and enhancement of sound in the recording, broadcast and forensic industries. In current research we are concerned with accurate modelling of digital audio and automated inference about the parameters and structure of those models. Research interests include computer music transcription, audio source separation, musical beat-tracking, chord recognition, Digital Audio Restoration, noise reduction, multichannel audio and sparse modelling with overcomplete dictionaries of atoms. Underpinning much of the work is a Bayesian statistical modelling approach to audio problems, see below.
See material for ICASSP 2015 paper on keystroke removal
Selected papers on the Audio Processing topic:
-
Geliang Zhang and Simon Godsill. Fundamental frequency estimation in speech signals with variable rate particle filters. IEEE/ACM Transactions on Audio, Speech, and Language Processing, 24(5):890–900, 2016.
-
Fallon, MF and Godsill, SJ (2012) Acoustic Source Localization and Tracking of a Time-Varying Number of Speakers. IEEE T AUDIO SPEECH, 20. pp. 1409-1415. ISSN 1558-7916
- Nielsen, JK and Christensen, MG and Cemgil, AT and Godsill, SJ and Jensen, SH (2011) Bayesian Interpolation and Parameter Estimation in a Dynamic Sinusoidal Model. IEEE T AUDIO SPEECH, 19. pp. 1986-1998. ISSN 1558-7916
- Christensen, JEN and Godsill, SJ (2011) Bayesian classification of acoustical waveforms under environmental variability. IEEE Workshop on Applications of Signal Processing to Audio and Acoustics. pp. 281-284.
- Peeling, PH and Godsill, SJ (2011) Multiple pitch estimation using non-homogeneous poisson processes. IEEE Journal on Selected Topics in Signal Processing, 5. pp. 1133-1143. ISSN 1932-4553
- Godsill, SJ (2010) The shifted inverse-gamma model for noise floor estimation in archived audio recordings. Signal Processing, 90. pp. 991-999. ISSN 0165-1684
- Fallon, M and Godsill, SJ (2009) Acoustic source localisation and tracking using track before detect. IEEE Transactions on Audio, Speech and Language Processing, PP. p. 1. ISSN 1558-7916
- Peeling, PH and Cemgil, AT and Godsill, SJ (2009) Generative spectrogram factorisation models for polyphonic piano transcription. IEEE Transactions on Audio, Speech and Language Processing, 18. pp. 519-527. ISSN 1558-7916
- Fevotte, C and Torresani, B and Daudet, L and Godsill, SJ (2007) Sparse linear regression with structured priors and application to denoising of musical audio. IEEE Transactions on Audio Speech and Language Processing, 16. pp. 174-185. ISSN 1558-7916
- Cemgil, AT and Godsill, SJ and Fevotte, C (2007) Variational and stochastic inference for Bayesian source separation. Digital Signal Processing, 17. pp. 891-913. ISSN 1051-2004
- Davy, M and Godsill, SJ (2006) Bayesian analysis of polyphonic western tonal music. Journal of the Acoustical Society of America, 119. pp. 2498-2517. ISSN 0001-4966
- Fevotte, C and Godsill, SJ (2006) A Bayesian approach for blind separation of sparse sources. IEEE Transactions on Audio, Speech and Language Processing, 14. pp. 2174-2188. ISSN 1558-7916
- Lombardi, MJ and Godsill, SJ (2006) On-line Bayesian estimation of signals in symmetric /spl alpha/-stable noise. IEEE Transactions on Signal Processing, 54. pp. 775-779. ISSN 1053-587X
- Fevotte, C and Godsill, SJ (2006) Sparse linear regression in unions of bases via Bayesian variable selection. IEEE Signal Processing Letters, 13. pp. 441-444. ISSN 1070-9908
- P. J. Wolfe, S. J. Godsill, and W.J. Ng. Bayesian variable selection and regularisation for time-frequency surface estimation. Journal of the Royal Statistical Society, Series B 66(3):575-589, 2004.
- M.Davy and S. J. Godsill. Bayesian harmonic models for musical signal analysis (with discussion). In J.M. Bernardo, J.O. Berger, A.P. Dawid, and A.F.M. Smith, editors, Bayesian Statistics VII. Oxford University Press, 2003.
- S. J. Godsill and P. J. W. Rayner. Robust reconstruction and analysis of autoregressive signals in impulsive noise using the Gibbs sampler IEEE Trans. on Speech and Audio Processing, 6(4):352-372, July 1998.
- Godsill, SJ and Rayner, PJW (1995) Bayesian approach to the restoration of degraded audio signals. IEEE Transactions on Speech and Audio Processing, 3. pp. 267-278. ISSN 1063-6676
Book:
- S.J. Godsill and P.J.W. Rayner. Digital Audio Restoration - a statistical model-based approach (Berlin: Springer-Verlag 1998)
Archival Talks:
- Bayesian harmonic models for musical signal analysis (with M. Davy). Invited lecture for Seventh Valencia conference on Bayesian Statistics - Tenerife, 2002
- Digital Audio Restoration. An introductory talk given at Helsinki University of Technology, Fall 2003
- An introduction to MCMC methods for sparse overcomplete sparse audio models. Tutorial for European Union Project HASSIP workshop, Cambridge, Sept. 2006
Tracking Algorithms
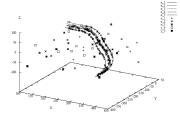
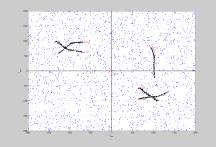
A major challenge in many application areas is that of detection, classification and tracking of multiple objects. Classic applications of this include radar and sonar, but the principles extend into computer vision, robotics and many other areas. We are aiming to push back the boundaries of current technology where many objects are present, detection probabilities are low and clutter rates are high. The methods devised use novel implementations of Monte Carlo Bayesian updating to carry out joint detection of number, characteristics and position of objects in cluttered environments.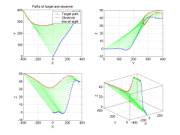
Selected papers
F. Septier A. Gning S. K. Pang S. Godsill L. Mihaylova, A. Carmi. Overview of sequential Bayesian Monte Carlo methods for group and extended object tracking. Digital Signal Processing, 25, February 2014. Pete Bunch and Simon Godsill. Approximations of the optimal importance density using gaussian particle flow importance sampling. Journal of the American Statistical Association, 0(ja):0–0, 2015. Xi Chen, Simo Sarkka, and Simon Godsill. A Bayesian particle filtering method for brain source localisation. Digital Signal Processing, 47:192 – 204, 2015. Special Issue in Honour of William J. (Bill) Fitzgerald. Bashar I Ahmad, James K Murphy, Patrick M Langdon, Simon J Godsill, Robert Hardy, and Lee Skrypchuk. Intent inference for hand pointing gesture- based interactions in vehicles. IEEE transactions on cybernetics , 46(4):878– 889, 2016. Fredrik Lindsten, Pete Bunch, Simo S¨arkk¨a, Thomas B Sch¨on, and Simon J Godsill. Rao-blackwellized particle smoothers for conditionally linear gaussian models. IEEE Journal of Selected Topics in Signal Processing , 10(2):353–365, 2016. James Murphy and Simon J Godsill. Blocked particle gibbs schemes for high dimensional interacting systems. IEEE Journal of Selected Topics in Signal Processing, 10(2):328–342, 2016. Pre-2013:- Bunch, P and Godsill, SJ (2013) Particle Smoothing Algorithms for Variable Rate Models. IEEE Transactions on Signal Processing, 61. pp. 1663-1675.
- Carmi, A and Septier, F and Godsill, SJ (2012) The Gaussian mixture MCMC particle algorithm for dynamic cluster tracking. Automatica, 48. pp. 2454-2467. ISSN 0005-1098
- Pang, SK and Li, J and Godsill, SJ (2011) Detection and Tracking of Coordinated Groups. IEEE T AERO ELEC SYS, 47. pp. 472-502. ISSN 0018-9251
- de Villiers, JP and Godsill, SJ and Singh, SS (2011) Particle predictive control. Journal of Statistical Planning and Inference, 141. pp. 1753-1763. ISSN 0378-3758
- Whiteley, NP and Singh, SS and Godsill, SJ (2010) Auxiliary particle implementation of the probability hypothesis density filter. IEEE Transactions on Aerospace and Electronic Systems, 46. pp. 1437-1454. ISSN 0018-9251
- Whiteley, NP and Johansen, AM and Godsill, SJ (2010) Monte Carlo filtering of piecewise deterministic processes. Journal of Computational and Graphical Statistics. pp. 1-21. ISSN 1061-8600
- S.J. Godsill, J. Vermaak, K-F. Ng, and J-F. Li. Models and algorithms for tracking of manoeuvring objects using variable rate particle filters. Proc. IEEE, May 2007.
- S.J. Godsill. Particle filters for continuous-time jump models in tracking applications. In ESAIM: PROCEEDINGS of Oxford Workshop on Particle Filtering, 2007.
- J. Vermaak, N. Ikoma, and S.J. Godsill. Sequential Monte Carlo framework for extended object tracking. IEE Proc.-Radar Sonar Navig., 152(5):353-363, October 2005.
- J. Vermaak, S. Godsill, and P. Perez. Monte Carlo filtering for multi-target tracking and data association. IEEE Tr. Aerospace and Electronic Systems, 41(1):309-332, January 2005.
- K. Gilholm, S.J. Godsill, S. Maskell, and D. Salmond. Poisson models for extended target and group tracking. In Proc. SPIE: Signal and Data Processing of Small Targets, 2005.
- S. J. Godsill and J. Vermaak. Variable rate particle filters for tracking applications. In Proc. IEEE Stat. Sig. Proc., Bordeaux, 2005.
- W. Ng, J.F. Li, S.J. Godsill, and J. Vermaak. A hybrid approach for online joint detection and tracking for multiple targets. In IEEE Aerospace Conference, 2005.
- S. J. Godsill and J. Vermaak, Models and algorithms for tracking using trans-dimensional sequential Monte Carlo. In Proc. IEEE ICASSP 2004
Genomic and Life Sciences Signal Processing
A further topic of great importance is the interpretation and analysis of genomic data - for example the sequencing of the human genome. Any improvements achievable in this area are likely to lead to improvements our understanding of genetics and in treatment for diseases such as cancer. Work to date has focused on improving the performance of DNA sequencing machines through very accurate Bayesian modelling. Currents topics of work include the accurate preprocessing of microarray data - crucial in identification of the genes active in certain diseases.Selected papers (pre-2006):
- Ji Won Yoon, Simon Godsill, Eriks Kupce, and Ray Freeman. Deterministic and statistical methods for reconstructing multidimensional nmr spectra . Magnetic Resonance in Chemistry, March 2006.
- N. M. Haan and S. J. Godsill. Bayesian models for DNA sequencing. In Proc. IEEE International Conference on Acoustics, Speech and Signal Processing, 2002
- N. M. Haan and S. J. Godsill. A time-varying model for DNA sequencing data submerged in correlated noise. In Proc. IEEE Workshop on Statistical Signal Processing, August 2001
- N.M. Haan and S.J. Godsill. Sequential methods for DNA sequencing. In Proc. IEEE International Conference on Acoustics, Speech and Signal Processing, 2001.
- N. M. Haan and S. J. Godsill. Modelling electropherogram data for DNA sequencing using variable dimension MCMC. In Proc. IEEE International Conference on Acoustics, Speech and Signal Processing, 2000.
Teaching
- 3F3 Signal and Pattern processing
- IB Paper 6 - Signal and Data Analysis
Other links:
- Book - Digital Audio Restoration - a statistical model-based approach (Springer-Verlag 1998)
- Bayesian Picture Gallery
sjg [at] eng.cam.ac.uk